Procedural Knowledge Learning¶
Chunking¶
Chunking is Soar’s experience-based mechanism for learning new procedural knowledge. Chunking utilizes Soar’s impasse-driven model of problem decomposition into sub-goals to create new productions dynamically during task execution. These new productions, called chunks, summarize the substate problem-solving that occurred which led to new knowledge in a superstate. Whenever a rule fires and creates such new superstate knowledge, which are called results, Soar learns a new rule and immediately adds it to production memory. In future similar situations, the new chunk will fire and create the appropriate results in a single step, which eliminates the need to spawn another subgoal to perform similar problem-solving. In other words, rather than contemplating and figuring out what to do, the agent immediately knows what to do.
Chunking can effect both speed-up and transfer learning. A chunk can effect speed-up learning because it compresses all of the problem-solving needed to produce a result into a single step. For some real-world agents, hundreds of rule firings can be compressed into a single rule firing. A chunk can effect transfer learning because it generalizes the problem-solving in such a way that it can apply to other situations that are similar but have not yet been experienced by the agent.
Chunks are created whenever one subgoal creates a result in a superstate; since most Soar programs are continuously sub-goaling and returning results to higher-level states, chunks are typically created continuously as Soar runs. Note that Soar builds the chunk as soon as the result is created, rather than waiting until the impasse is resolved.
While chunking is a core capability of Soar, procedural learning is disabled by default. Refer to the following CLI commands for more information about enabling and using chunking:
Explanation-based Behavior Summarization¶
Explanation-based behavior summarization (EBBS) improves on generality and correctness issues in previous versions of chunking. EBBS learns general rules with the full expressive power of hand-written rules.
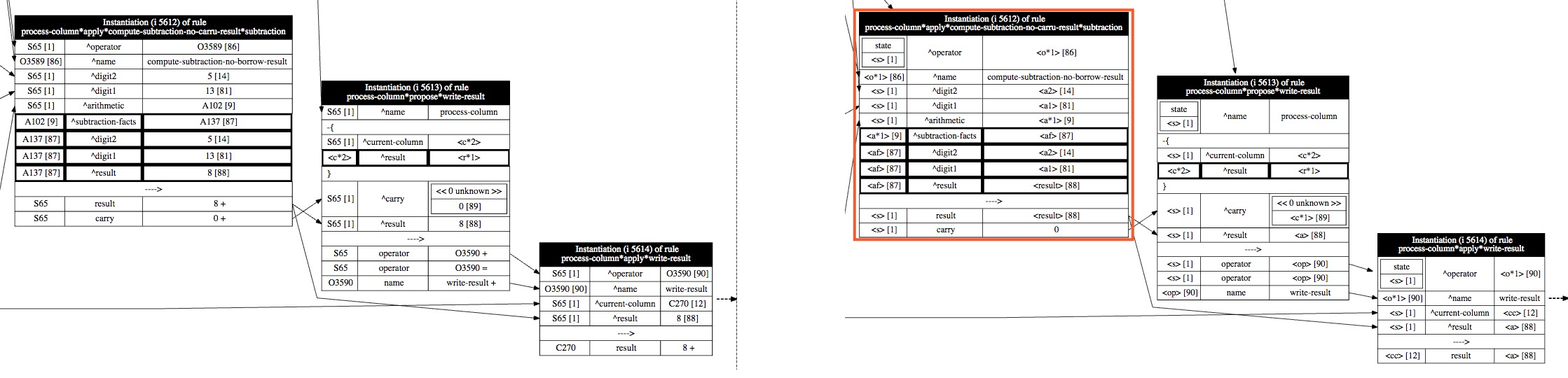
The following side-by-side code comparison shows an example of an explanation-based chunk and how it differs from a chunk learned from the original algorithm. It is interesting to note that in Soar 9.4, the arithmetic agent learns 1263 rules like the one on the left-side of the figure. In Soar 9.6, the same agent only learns 8 rules like the one on the right because they are so much more general.
To achieve this generality, chunking needs information about how rules matched in a substate and how those rules interacted. This allows it to determine what is generalizable and what limits there are on those generalizations. Unfortunately, the information necessary to determine this information was not readily available in prior versions of Soar which only recorded a trace of all WMEs that were tested in the substate. This trace, which we call the working memory trace possesses limited explanatory information, which limited chunking to learning very specific rules in which only Soar identifiers were variablized and all other elements tested the exact values found in the working memory trace.
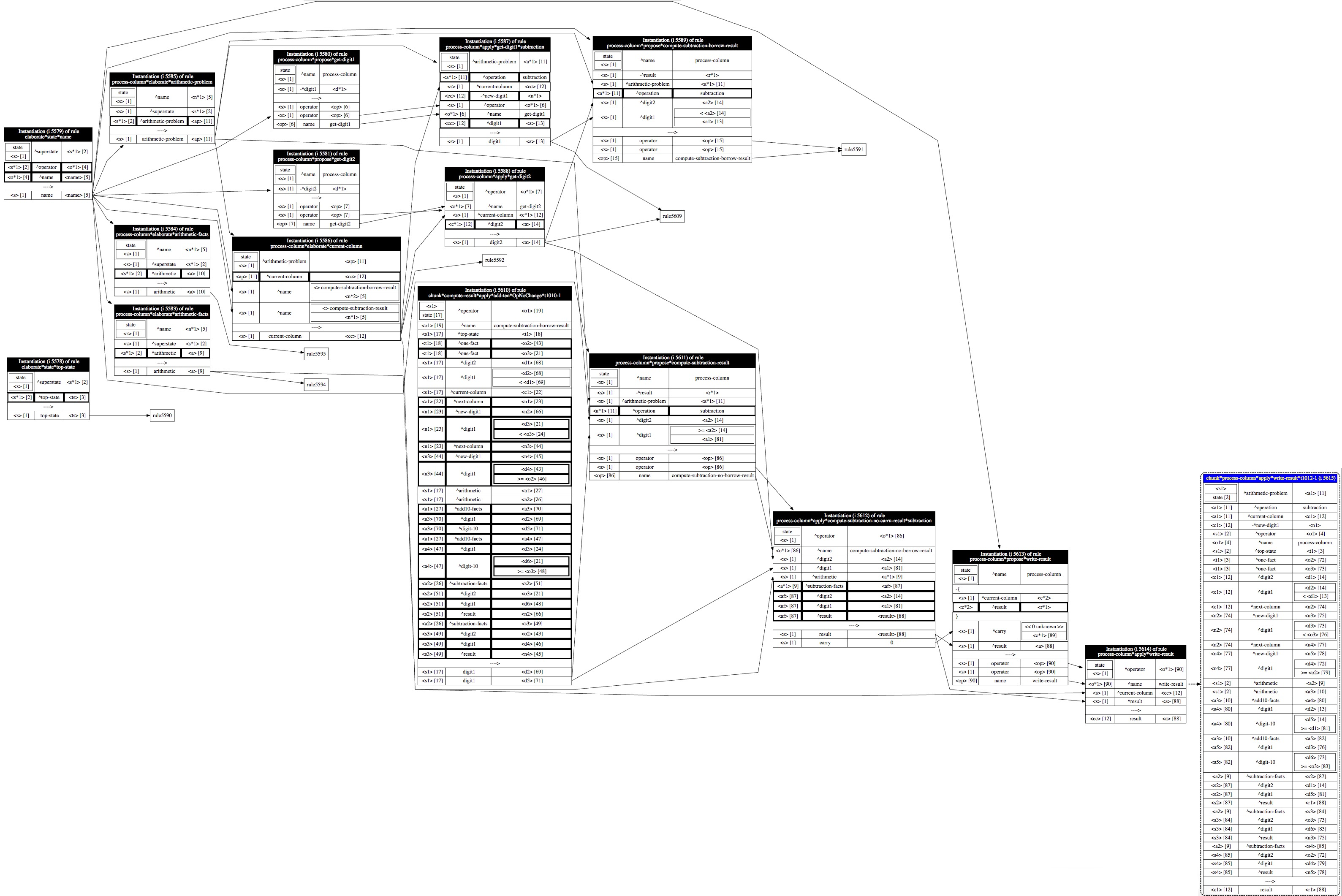
To remedy this limitation and produce more general chunks, EBBS creates and analyzes a behavior trace. Figure below shows an example behavior trace.
Note that this trace is generated dynamically as rules match. Whenever a rule matches during agent execution, Soar creates an internal record of the rule that fired, which is called a rule instantiation. (Each box in the behavior traces of this chapter represents an instantiation that was created during task execution within a particular substate.) The instantiation contains both instance information about what matched (the working memory elements) and explanatory information about why they matched (the rules and actions in the original rules that contains variables, constraint tests, RHS actions, etc.).
Note that WMEs that were automatically created by the architecture have special
instantiations that explain why they were created. For example, an architectural
instantiation is created for each ^item attribute automatically created in
operator tie impasse substates; the explanation causes the ^item augmentation
to be dependent on the operator in the super-state that led to it, which means
that chunks learned which tested that ^item augmentation will cause the chunk to
also be dependent on the operator in the superstate.
Similarly, architectural instantiations are created for structures recalled by semantic and episodic memory in the substate.
All of the instantiations that were created in a substate form the instantiation graph of that substate. As chunking backtraces through the instantiation graph, it determines the subset of instantiations that contributed to a result. This set of instantiations and the connections between them is the basis for the behavior trace used for a learning episode. (At this point, the behavior trace is a subgraph of the instantiation graph.)
EBBS also creates an identity graph as it incrementally builds the instantiation graph. Production memory has knowledge about the actual matched value for each element in each condition of a rule in the instantiation graph. Some elements are variables, some are literal constants, some variables are the same as other variables, constraints are placed on some variables. Distributed Identity Graph Unification (DIGU) annotates each element with a pointer that maps it to either a new or existing identity in the identity graph. This annotation is used to determine whether elements in different instantiations refer to the same underlying object and supports identity-based variabilization.
Overview of the EBBS Algorithm¶
Basic concepts:
- Every condition and action in the instantiation graph has three elements:
- For conditions, the three elements refer to the symbol in the positive
equality test for the identifier, attribute and value of the condition.
For example, the last condition of rule 2 in the
explanation trace figure has
<s>as the identifier element, number as the attribute element, and<y>as the value element. - For actions, the three elements refer to the identifier, attribute and value of the WME being created.
- For conditions, the three elements refer to the symbol in the positive
equality test for the identifier, attribute and value of the condition.
For example, the last condition of rule 2 in the
explanation trace figure has
- An element is either a variable, like
<s>or a literal constant, like23,3.3, orsomeString
Identity¶
Before we can discuss the algorithm, we must first define one of its central concepts: identity.
- An identity is the set of all variables in a trace that refer to the same underlying object. - So we can say that two variables are said to share an identity if they both refer to the same underlying object.
- The NULL identity is a special identity that indicates an element which cannot be generalized and must contain a specific value. - All elements in the original rule that reference specific constant values are trivially assigned the NULL identity. - A variable’s identity can also be mapped to the NULL identity. When this happens, we say the identity has been literalized.
EBBS traverses a behavior trace of the problem-solving that occurred in the substate to determine which variables in different rule instances refer to the same underlying object. Identities can be shared in the following situations.
- Variables that have the same name and are in the same rule firing will share an identity This is the trivial case. The basic semantics of rules implies that the same variable in a rule references the same underlying object.
- If a RHS action of one rule creates a WME and a LHS condition of another rules tests that same WME, then all variables in the condition and actions will possess the same identity as their counterpart’s corresponding element. The interaction between the two rules indicates a shared identity between their corresponding variables.
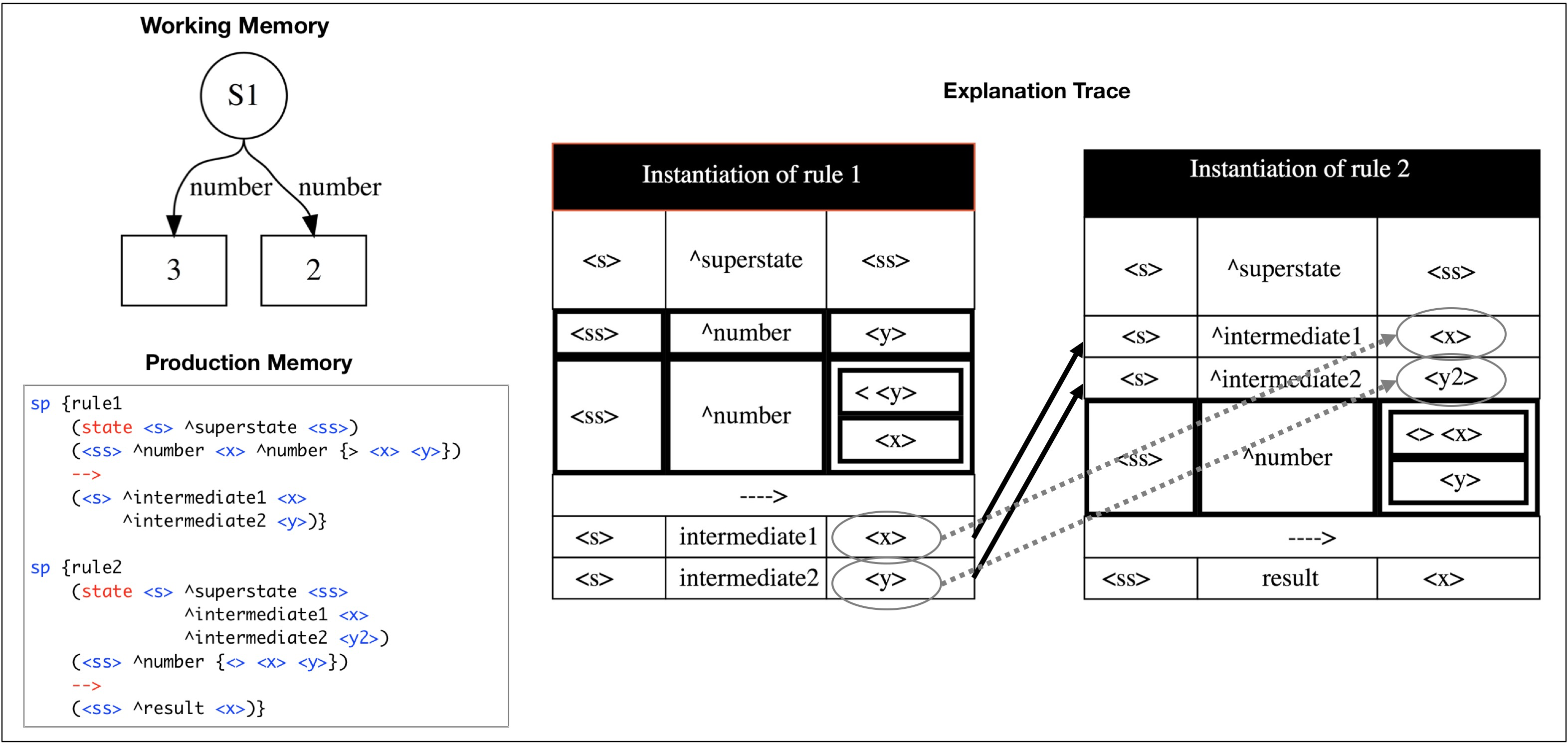
To get a better picture of what a shared identity is, consider the two simple
rules and the behavior trace of how they matched in a substate as shown in
the explanation trace figure.
The connection between rule 2 and rule 1 will unify the identities
of <s> ,<x> an <y> in rule 1 with the identities of <s> ,<x> an <y2>
in rule 2. So, the <x> in rule 2 shares the same identity as the <x> in rule 1.
Similarly, the <y2> in rule 2 shares the same identity as <y> in rule 1. In
contrast, the <y> in rule 2 does NOT share the same identity as the <y> in rule
1.
It doesn’t matter that the <y> in rule 1 uses the same variable name as
the<y> in rule 2. It also doesn’t matter that both conditions with <y>
happen to match the same working memory element, (S1 ^number 3). In terms of
sharing an identity, the only thing that matters is how the rules interact,
namely whether there’s a connection between elements in the condition of one
rule and elements in the actions of another rule.
Variable identities can also be mapped to the NULL identity, which means that any elements in the final rule that share that identity will not be variablized. When this happens, we say that the identity has been literalized. There are two ways that a rule interaction can effect an identity literalization:
- If a RHS action of one rule creates a WME element using a constant, literal value in an element and a LHS condition tests that element, then the identity of the condition’s variables is literalized and mapped to the NULL identity. Because the variable in the condition matched a rule that will always create the same constant, literal value, the condition’s variable must have that same value. Otherwise, it would not have matched.
- If a RHS action of one rule creates a WME element using a variable and a LHS condition tests that that element is a specific value, then the identity of the action’s variables is literalized and mapped to the NULL identity. Because the condition requires that the rule that created the matched WME to have a specific constant, literal value, the action’s variable must have that same value. Otherwise, it would not have created something that matched the condition.
Identities are the basis of nearly every mechanism in EBBS. DIGU, which is a fairly complicated process, determines all identities in a behavior trace. The following figure shows a trace after identity analysis has been performed. Elements that share an identity in the figure are colored the same.
While it’s not readable in this figure, note that each identity is assigned a numeric ID. Both the explainer and the visualizer annotate elements of an explanation with the identity ID in square brackets. These numbers are simply syntactic sugar to ease debugging and make traces easier to understand. Underneath the hood, every test in a condition has a pointer to more complicated identity data structure that will be discussed in more detail in Section Identity Assignment and Propagation on the identity graph.
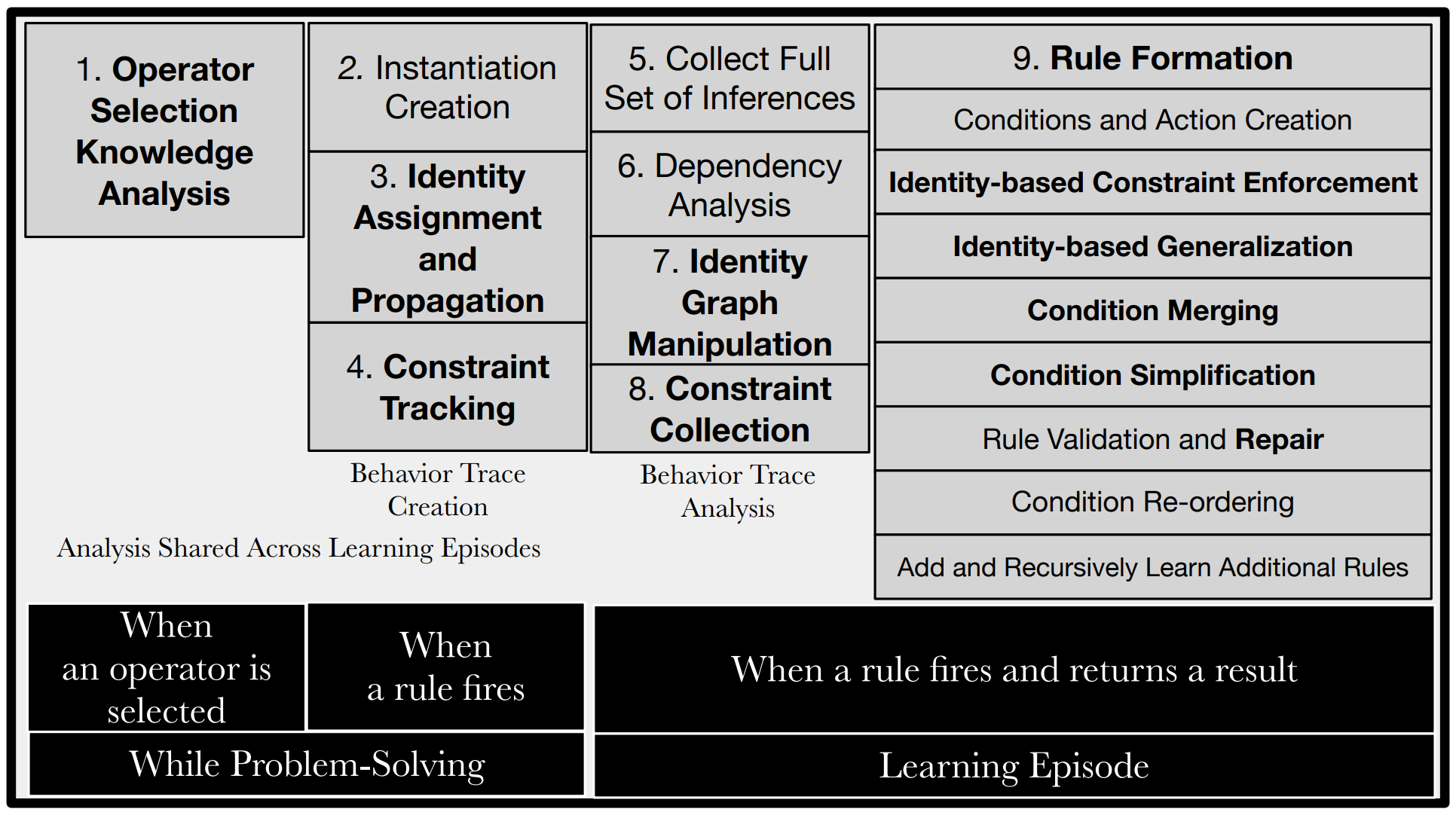
The Nine Components of Explanation-Based Behavior Summarization¶
-
Operator Selection Knowledge Analysis This component also occurs before the learning episode. Whenever an operator is selected, it analyzes what rule firings contributed necessary operator selection preferences and caches them in all rule instances that tests that operator.
-
Instantiation Creation As a rule is fired, copies of the exact knowledge structures that matched each condition are made.
-
Identity Assignment and Propagation When a rule matches, identities are created and assigned for each element. The identity graph built during these rules firings is manipulated later for further generalization and identity sharing.
-
Constraint Tracking This component stores every value or relational constraint (e.g.
<> <x>,>= 3.14,<< disjunction of constants >>) placed on variables. -
Collect Full Set of Inferences When a rule creates a result with an identifier, children of that identifier also become results. This step determines which working memory elements become supergoal results.
-
Dependency Analysis The first part of a learning episode, this step backtraces through the behavior trace to determine which rule conditions test working memory elements in a supergoal. This works similarly in classical chunking.
-
Identity Graph Manipulation As backtracing occurs, the identity graph is also manipulated to build rules at the right level of generality and to prevent correctness issues in previous versions of chunking.
-
Constraint Collection Constraints recorded during constraint tracking that are encountered during backtracing are copied to the relevant identities in the identity graph. Later, during rule formation, these constraints are enforced on identities included in the learned rule.
-
Rule Formation The above eight components performed the analysis that EBBS needs to form a general but correct rule. This final component uses the results of that analysis to actually build the new rule. This is a complex component that has eight different stages. If a valid rule is created, Soar immediately adds the rule to production memory.
The following sections will describe each component in more detail.
What EBBS Does Prior to the Learning Episode¶
While most of the work that EBBS performs occurs during the learning episode, i.e. after a rule in a substate fires and Soar detects that a result will be created, some critical aspects of the analysis it performs also occur prior to the learning episode, during problem-solving in the substate. The two points when that happens is when a rule fires in a substate and when an operator is selected in a substate.
Operator Selection Knowledge Analysis¶
As described in the beginning of this chapter, chunking summarizes the processing required to produce the results of subgoals. Traditionally, the philosophy behind how an agent should be designed was that the path of operator selections and applications from an initial state in a substate to a result would always have all necessary tests in the operator proposal conditions and any goal test, so only those items would need to be summarized. The idea was that in a properly designed agent, a substate's operator evaluation preferences lead to a more efficient search of the space but do not influence the correctness of the result. As a result, the knowledge used by rules that produce such evaluation preferences should not be included in any chunks produced from that substate.
In practice, however, it may make sense to design an agent so that search control does affect the correctness of search. Here are just two examples:
-
Some of the tests for correctness of a result are included in productions that prefer operators that will produce correct results. The system will work correctly only when those productions are loaded.
-
An operator is given a worst preference, indicating that it should be used only when all other options have been exhausted. Because of the semantics of worst, this operator will be selected after all other operators; however, if this operator then produces a result that is dependent on the operator occurring after all others, this fact will not be captured in the conditions of the chunk.
In both of these cases, part of the test for producing a result is implicit in search control productions. This move allows the explicit state test to be simpler because any state to which the test is applied is guaranteed to satisfy some of the requirements for success. However, chunks created in such a problem space will not be correct because important parts of the superstate that were tested by operator evaluation rules do not appear as conditions. The chunks would not accurately summarize the processing in that problem state. The tracking of Relevant Operator Selection Knowledge (ROSK) is a way to address this issue.
Relevant operator selection knowledge is the set of necessary operator evaluation preferences that led to the selection of an operator in a subgoal. As previously described, whenever Soar learns a rule, it recursively backtraces through rule instances to determine which conditions to include in the final chunk or justification. With the ROSK, not only does Soar backtrace through each rule instance that created a matched working memory element, but it also backtraces through every rule instance that created preferences in the ROSK for any operator that gave those matched WMEs o-support. By backtracing through that additional set of preferences at each step of the backtrace, an agent will create more specific chunks that incorporate the goal-attainment knowledge encoded in the operator evaluation rules.
Specifically, this component does two things:
-
When an operator is selected, it analyzes the operator preferences that led to the decision, and caches any operator selection knowledge that played a necessary role in the selection.
All necessity preferences, i.e. prohibit and require preferences, are always included in the ROSK since they inherently encode the correctness of whether an operator is applicable in a problem space. In contrast, some desirability preferences (rejects, betters, worses, bests, worsts and indifferents) are included in the ROSK depending on the role they play in the selection of the operator.
How Soar determines which of those preferences to include in the ROSK is determined by the preference semantics it uses to choose an operator. During the decision phase, operator preferences are evaluated in a sequence of seven steps or filters, in an effort to select a single operator, as described in how preferences are evaluated to decide an operator. Each step, or filter, handles a specific type of preference. As the preference semantics are applied at each step to incrementally filter the candidate operators to a potential selected operator, EBBS incrementally adds operator preferences to the ROSK based on the preferences that were instrumental in applying each filter. A more detailed explanation of the logic used at each step can be found in determining which OSK preferences are relevant.
-
When an o-supported rule matches, EBBS caches the operator's ROSK in the instantiation of that rule. Since that selection knowledge was necessary to select the operator needed for the rule to match, EBBS must backtrace through that knowledge. Cached ROSK is used to do this and incorporate the necessary operator selection reasoning knowledge into the learned rule. For some types of agent designs, including operator selection knowledge is needed to ensure correctness.
Instantiation Creation¶
Whenever a rule matches, EBBS creates a record called an instantiation that contains information about what specific working memory elements matched, what elements were created, and extends the instantiation graph by creating links from other instantiations to this instantiation for those instantiations that correspond to rule firings that created the elements tested in the rule.
Identity Assignment and Propagation¶
Each instantiation describes the working memory elements that matched each condition and the working memory elements and preferences that are created by each action. With the introduction of EBBS, all instantiations now also store the underlying explanation behind each condition and action as defined by the original rule: which elements in conditions are variables and which ones are literal constants, which variables are the same variables, what constraints must be met on the values of each variable and any relationships between variables.
EBBS uses this underlying logic to determine the identities of objects used during the problem-solving. Identities are not simply IDs. Each identity is a declarative object that describes a set of variables across multiple rule firings and the various properties they hold.
When an instantiation is created, EBBS assigns all elements of every condition and action to an identity, creating new identities as necessary. Identities are created and propagated using the following rules:
- If the same variable appears in multiple places in the same rule, it must be assigned the same identity.
- The NULL Identity is assigned to any element with a literal value in the original rule.
- A new identity is created and assigned for:
- All right-hand side action elements that produce a new Soar identifier in the substate These are also known as unbound RHS variables.
- All variable elements of conditions that matched superstate WMEs It is important to note that if two conditions both match the same superstate WME, each condition is considered independent. This means that each condition is assigned new identities for each of its elements and will produce its own condition in the final learned rule. This is a key way that EBBS differs from previous versions of chunking.
- An existing identity is propagated for:
- Any condition element that matched a substate WME with existing identities Each element is assigned the identity found in the corresponding element of the action of the rule that created that WME. This propagates identities forward through the behavior trace, which allows us to represent that the variable in the condition refers to the same object as the variable in the action of the other rule.
- Any element that matches special working memory elements called singletons
are assigned the same identity. Singletons are working memory elements
that are guaranteed to only have a single possible value in a state. The
most important singleton is the local
^superstatesingleton, which is an architecturally created WME that links the substate to the superstate, for example(S2 ^superstate S1). Since we know that it’s impossible for there to be two superstate features in a state, all conditions that test that singleton WME will be assigned the same identities. While there are a variety of built-in singletons for architecturally-created WMEs, users can also specify their own domain-specific singletons to eliminate unnecessary generality when learning. The full list of architecturally-created singletons can be found in thechunkcommand’s help entry.
Note that rule 1 may conflict with other rules. For example, if a variable appears in two different conditions, then two different identities may propagate into each one of them. In such cases, rule 1 is always enforced and propagation is ignored. During the second phase of identity analysis, which occurs during the actual learning episode, EBBS will re-examine all of the condition-action pairs as it performs a backward traversal of the behavior trace and fix the missing propagations. It does this by creating and manipulating an identity graph that can correctly incorporate all identity relationships.
Constraint Tracking¶
Rules underlying a behavior trace can include conditions that impose constraints on the values that a variable can hold. These can include equality tests, disjunctions, relative comparisons, literal tests, and conjunctions of constraints. These constraints must be included in later analysis of the behavior trace so that overgeneral rules are not created that fire when those constraints are not met. Thus, as instantiations are created, EBBS stores with each instantiation the constraints required for that rule to match.
Constraints are stored relative to identities used in an instantiation. If a
rule tests that <x> < 7, EBBS would record on identity node 1 associated with
<x> that identity node 1 must have a value less than 7. Similarly, if another
condition imposed the constraint <> <y> on <x> and <y> was mapped to
identity node 2, then EBBS would record on identity node 1 that it cannot have
the same value as identity node 2.
What EBBS Does During the Learning Episode¶
All of the previously discussed steps occurred during problem-solving in the substate as rules matched and operators were selected. It is worth noting that the analysis performed prior to the learning episode (such as identity propagation) is persistent and can be shared across learning episodes. In other words, EBBS can repeatedly re-use that analysis if it learns multiple chunks in the same substate.
Every time a rule fires in a substate, Soar checks to see if any of the working memory elements created by the rule qualify as results. This is when the actual learning episode begins.
Collect Full Set of Inferences¶
A chunk’s actions are built from the results of a subgoal. Aresultis any working memory element created in the substate that is linked to a superstate. A working memory element is linked if its identifier is either the value of a superstate WME, or the value of an augmentation for an object that is linked to a superstate.
The results produced by a single production firing are the basis for creating the actions of a chunk. A new result can lead to other results by linking a superstate to a WME in the substate. This WME may in turn link other WMEs in the substate to the superstate, making them results. Therefore, the creation of a single WME that is linked to a superstate can lead to the creation of a large number of results. All of the newly created results become the basis of the chunk’s actions.
Backtracing¶
When learning a new rule, EBBS performs a dependency analysis of the productions that fired in a substate – a process called backtracing. Backtracing works as follows. For each instantiated production that creates a subgoal result, backtracing examines the behavior trace to determine which working memory elements matched each condition. If the working memory element is local to the substate, then backtracing recursively examines the instantiation that created that condition’s matched working memory element. Thus, backtracing traces backwards through all rules that fired and created working memory elements that were used to produce a result.
If an instantiation being backtraced through tested a selected operator, EBBS
will backtrace through each instantiation that created a preference in that
operator’s relevant operator selection knowledge set. This behavior is off by
default and can be enabled with chunk add-osk on.
Multiple components of EBBS perform their work during backtracing: dependency analysis, identity graph manipulation and constraint collection. The following sections will discuss what aspects of the agent’s problem-solving are analyzed during backtracing.
Dependency Analysis¶
The traditional core function of chunking’s backtracing is to determine which conditions in the working memory trace tested working memory elements accessible to the superstate. These conditions will form the left-hand side of the rule.
Note: Soar 9.6.0’s explanation-based approach has led to one key change to Soar’s operationality analysis. In previous versions of chunking, chunking would never add two conditions to a chunk that matched the same superstate working memory element. This made sense because chunking was based on a generalization of the working memory trace. More than one condition that tested the same WME would be redundant. Explanation-based behavior summarization, though, learns based on the reasoning within the original hand-written rules. Since the reasoning behind each of the two conditions may be different even if they matched the same WME, EBBS must always add both conditions. (Note that there are some exceptions. See chunk singletons on superstate singletons and user singletons.)
Negated conditions are included in a trace in the following way: when a production fires, its negated conditions are fully instantiated with its variables’ appropriate values. This instantiation is based on the working memory elements that matched the production’s positive conditions. If the variable is not used in any positive conditions, such as in a conjunctive negation, a dummy variable is used that will later become a variable in a chunk. If the identifier used to instantiate a negated condition’s identifier field is linked to the super-state, then the instantiated negated condition is added to the trace as a negated condition. In all other cases, the negated condition is ignored because the system cannot determine why a working memory element was not produced in the subgoal and thus allowed the production to fire.
Identity Graph Manipulation¶
The first phase of identity analysis, forward identity propagation, occurred as rules fired and instantiations were recorded. Unfortunately, forward propagation alone will not produce correct identities. We previously gave one reason why this is the case – conditions may have conflicting identities propagated forward – but there are other, more complicated reasons as well that are beyond the scope of this document. What is important to know is that a second phase of identity analysis will be performed during backtracing that will refine and correct the limitations of the initial forward propagation of identity. This second phase achieves these corrections by building an identity graph, which represent the identities involved during problem-solving, and manipulating it as it backtraces through the behavior trace.
The Identity Graph¶
The identity graph initially contains a node for each identity used in the instantiation graph. Each node can have multiple edges that point to children identities and a single directed join edge that initially points back to itself. As the agent backtraces through the instantiation graph, EBBS will manipulate the identity graph based on the condition-action pairs it encounters.
- Joining identities If a condition matches an action with a conflicting identity, EBBS performs a join operation between the two identities. This chooses one identity as the joined identity and points the join edges of the other identity and any previously joined identities to the new joined identity. Note that any time EBBS uses an element’s identity, it is actually using the joined identity.
- Literalizing identities If a condition/action with a variable element matches an action/condition with a literal element, EBBS marks the identity as literalized. This means that any conditions in the final chunk that have elements with that identity will be considered to have the NULL identity, just like constants, and will not be variablized. Instead, the matched value will be used for that element.
Constraint Collection¶
Some constraints in the behavior trace may not test working memory elements in the superstate, but could transitively place constraints on the values of variables in conditions that \textit{will} appear in a chunk. To handle this, once backtracing is complete, EBBS:
- stores constraints on the value a single identity, for example
>=0,<23. - stores relational constraints between two identities, for example
> <min>,< <max>or<> <other>. - stores all of these constraints based on the underlying identities, not
the variables used. For example, if a variable
<foo>had the constraint<> <other>, EBBS would record that the variables that share the identity of<foo>cannot have the same value as variables that share the identity of<other>.
Rule Formation¶
There are eight distinct, sequential stages to rule formation:
- Conditions and Action Generation
- Constraint Enforcement
- Identity-based Generalization
- Condition Merging
- Condition Simplification
- Rule Repair and Validation
- Condition Re-Ordering
- Add and Recursively Learn Additional Rules
The following sections will give a brief overview of each stage.
Condition and Action Creation¶
This stage creates the basis for the left-hand and right-hand side of the rule. To create the initial conditions of the chunk, it copies all conditions in the behavior trace that were flagged as operational during backtracing. These initial conditions contain literal values for each element. To form the actions of the chunk, it creates copies of the actions that produced each of the result and all children of those results that came along for the ride.
Identity-based Constraint Enforcement¶
This stage adds all constraints on conditions that were collected during backtracing. As previously described, each constraint is indexed in terms of the identity it constrains. So,if the identity being constrained exists in one of the conditions of the learned rule, EBBS will enforce the constraint by adding a new test to that condition.
One situation in which attaching a constraint can be tricky occurs when the
constrained identity has been literalized but the constraint itself refers to an
identity that has not been literalized, for example { > <x> 3 }. While that
constraint references a condition element that can only match a value of 3 , the
relationship between 3 and the identity o <x> must still hold (assuming <x>
appears in a different element somewhere else in the rule.) Since these
constraints still need to be enforced to ensure a correct rule, EBBS will invert
the constraint and attach it to a variable in another condition. In this
example, it would add a < 3 to some other condition with an element that had
<x>’s identity.
Identity-Based Generalization¶
To achieve any useful generality in chunks, identifiers of actual objects must be replaced by variables when the chunk is created; otherwise chunks will only ever fire when the exact same objects are matched. At this point in the algorithm, all of the real work needed to determine the most general but correct variablization has already been performed by the identity analysis component.
So, this step simply needs to replace all elements with non-NULL identities with variables, making sure that elements with the same joined identity are assigned the same variable. This step also makes sure to skip and elements with identities that have been flagged as literalized.
Conditionn Merging¶
Any two conditions in the learned rule that share the same identities in all three elements can be combined. In such cases, it is logically impossible for those two conditions to match two different WMEs and cause the same rules to match in the substate. (If the two conditions were to match two different WMEs, at least one of the other rules in the behavior trace that had unified the two conditions would not have matched.) As a result, EBBS can safely merge those two conditions without losing generality.
Condition Simplification¶
EBBS polishes the conditions of the learned rule by pruning unnecessary constraints on literalized elements and replacing multiple disjunction constraints with a single simplified disjunction.
- Merging disjunctions: If an element in a condition has two disjunction
tests, the constraints will be merged into a single disjunction that
contains only the shared values.
{ << a b c >> << b c d >> <x>}becomes{ <<b c >> <x> }, because it is impossible fo<x>to be either a or b. This will also eliminate any duplicate disjunctions. - Throwing out unnecessary constraints: If an element in a condition has been
literalized but also has a literal constraint on its value, then the
constraint is unnecessary and will be thrown out. For example,
<s> ^value{ < 33 23 }becomes<s> ^value 23.
Rule Validation and Repair¶
At this point, the rule is essentially formed. Chunking must now make sure that the learned rule can be legally added to production memory. Specifically, the rule cannot have any conditions or actions that are not linked to a goal state specified in the rule.
If an unconnected action or condition is found, EBBS will attempt to repair the rule by adding new conditions that provide a link from a state that is already tested somewhere else in the rule to the unconnected condition or action.
To repair the rule, EBBS performs a search through working memory to find the shortest path of working memory elements that lead from a state identifier in the rule to a WME with the identifier in the unconnected condition or action. A new condition is then added for every WME in that found path, which is then variablized.
Note that there may be multiple paths from a state to the unconnected identifier. EBBS does a breadth-first search, so it will find one with the shortest distance.
Conditions Re-ordering¶
Since the efficiency of the Rete matcher depends heavily upon the order of a production’s conditions, the chunking mechanism attempts to sort the chunk’s conditions into the most favorable order. At each stage, the condition-ordering algorithm tries to determine which eligible condition, if placed next, will lead to the fewest number of partial instantiations when the chunk is matched. A condition that matches an object with a multi-valued attribute will lead to multiple partial instantiations, so it is generally more efficient to place these conditions later in the ordering. This is the same process that internally reorders the conditions in user-defined productions, as mentioned briefly in the structure of a production.
If the constructed rule is not a duplicate of an existing rule, it is added to production memory.
Add and Recursively Learn Additional Rules¶
When a rule is added, it may generate another learned rule. Once the learned rule is added to production memory, it is guaranteed to immediately match in the supergoal. When it does, the chunk makes new data structures and EBBS creates an instantiation for the chunk that includes new identities relative to the existing identity graph. In the case when a problem has been decomposed into at least two subgoals and the newly created chunk makes results for an even higher level goal, EBBS then backtraces and creates a second chunk based on the reasoning in the subgoal that the chunk matched it. This process stops when a chunk only generates working memory elements in the same state it matched in.
Subtleties of EBBS¶
Relationship Between Chunks and Justifications¶
Chunks are closely related to another type of rule called a justification. Justifications are also created when a substate creates a result for a superstate, the difference being that justifications are only built when learning is off. These justifications are needed to decide whether the working memory elements in the result should get i-support or o-support in the superstate. To do that, Soar needs to determine whether any rules involved in the creation of the result tested the selected operator in the superstate, which is exactly the same type of analysis that chunking does.
As a result, Soar uses a limited version of the chunking algorithm to do that. It analyzes the substate problem-solving and learns a new, temporary rule, a "justification", which is added to production memory. If this temporary rule tests an operator in the superstate, it gives the result o-support. (Note that when learning is on, a justification is not needed since the chunk will provide the correct support.)
Justifications use all the components described in the previous sections and are even affected by the current chunk settings. You can even print justifications out like other rules. The only differences between chunks and justifications are:
Info
Even though justifications don’t contain variables, justifications can be over-general because they don’t incorporate enough knowledge, for example, operator selection knowledge.
-
Every condition and action in a justification contain the literal values that matched. Justifications contain no variables.
Info
Justifications can have variables in the negated conditions and negated conjunctions of conditions. They just don’t have any variables in its positive conditions.
-
Justifications don’t contain any of the value constraints that a chunk would have.
- Justifications get removed from production memory as soon as their conditions no longer match.
Chunk Inhibition¶
If a newly learned chunk was immediately added to production memory, it would immediately match with the same working memory elements that participated in its creation. This can be problematic if the production’s actions create new working memory elements. Consider the case where a substate proposes a new operator, which causes a chunk to be learned that also proposes a new operator. The chunk would immediately fire and create a preference for another new operator, which duplicates the operator preference that was the original result of the subgoal.
To prevent this, Soar uses inhibition. This means that each production that is built during chunking is considered to have already fired with an instantiation based on the exact set of working memory elements used to create it.
Note that inhibition does not prevent a newly learned chunk from immediately matching other working memory elements that are present and creating a new instantiation.
Chunks Based on Chunks¶
When a problem has been decomposed into more than one substate, a single result can produce multiple chunks. This process is called bottom-up chunking. The first chunk is produced in the substate where the problem-solving that produced the result occurred. The next chunk is based on the implicit match of the first chunk in one of the higher level problem-spaces. If that match is lower than the state that the result is being returned to, Soar will backtrace through the chunk match and learn a second chunk (relative to the substate that the chunk matched in). This process continues until it learns a chunk that only creates working memory elements in the same state that it matched in.
Mixing Chunks and Justifications¶
If an agent is using the only or except setting, then justifications will be built in states where learning is disabled and chunks will be built in states where learning is enabled. In these situations, justifications also serve another purpose: they provide an explanation of the results for future learning episodes in states that do have learning on. EBBS does this by retaining all of the extra information that chunks have but justifications do not, namely those extra tests and how things would have been variablized. This allows EBBS to learn chunks from justifications as readily as it can from hand-written rules and other chunks.
When mixing justifications and chunks, users may want to set the explainer to record the learning episodes behind justifications. This allows one to examine the reasoning behind a justification just like you would a chunk, which may be important if that justification later participates in the formation a chunk. See the explainer’s settings for more information.
Generality and Correctness of Learned Rules¶
Chunking is intended to produce the most general rule that is also correct.
Generality is a measure of the space of similar situations that a rule can apply to. A more general rule can be applied to a larger space of similar situations. A rule is considered over-general if it can apply to situations in which the original problem-solving would have never occurred.
Correctness is a requirement that the learned rule produces the exact same results that the original problem-solving would have produced. In other words, if we inhibited a correct chunk so that it did not fire, the agent should subgoal, execute the same substate reasoning that it previously performed when learning the chunk, and produce the same results that the learned chunk produces.
Note that an over-general rule is an incorrect rule, but not all incorrect rules are over-general.
Over-specialization and Over-generalization¶
Explanation-based behavior summarization was pursued to address the main limitation of traditional chunking: over-specialized rules that were very specific and could not be applied to many other situations. Specifically, EBBS’s identity-based variablization and constraint tracking/enforcement has eliminated the core source of this issue.
The nature of EBBS’s algorithm does add two new situations in which rules may become over-specialized. Generalizing knowledge retrieved discusses how variables used in certain RHS functions need to be literalized to maintain correctness, which can cause overspecialization. Previous results and rule repair discusses how testing or augmenting a previous result creates rules that require repair, a process which may sometimes over-specialize a rule. Note that this situation can easily be avoided and, even when it does occur, may not add much unnecessary specificity to learned rules.
While over-specialization may no longer be a common problem, it is still possible to get over-general rules. Several of the sources of correctness issues listed in the next section can produce over-general rules in certain situations.
Previous Results and Rule Repair¶
An agent may learn a slightly over-specialized rule when EBBS repairs a rule that has unconnected conditions, which are conditions that have an identifier that is not linked to one of the states referenced in the rule. Such rules are illegal and cannot be added to Soar’s production memory.
Rules that require repair are caused by substate problem-solving that tests or augments a previous result. A previous result is a working memory element that was originally created locally in the substate but then later became a result when a rule fired and connected it to the superstate. (At which point a chunk must have been learned.). If another substate rules later matches or augments such a previous result WMEusing a path relative to the local substate, then EBBS will have problems. It won’t know where in the superstate that working memory is located is and how it should be referenced in the learned rule, because the problem solving referenced the result relative to the local substate.
As described in validating rule and repairing unconnected conditions, EBBS repairs the rule by adding new grounding conditions that provide a link from a state, which is tested somewhere else in the rule, to the unconnected condition or action. It does this by searching through working memory to find the shortest path from a state to the identifier behind the unconnected element. It then variablizes those conditions appropriately.
Since the conditions are based purely on what happened to be in working memory at that point and nothing in the explanation dictated that particular path found during the search, the learned rule may be over-specialized. The chunk will only match future situations where the previous result can be found on that same path. Fortunately, new chunks can be learned to ameliorate this. If a similar situation is encountered in the future, but with a different path to the unconnected element, the chunk won’t fire, because the added grounding conditions won’t match, which should cause the agent to subgoal and learn a similar chunk with a different set of grounding conditions.
Note that if an agent designer expects that the path to the previous result found by the search will always exist, a repaired rule should match just as generally as an unrepaired rule.
But if this is not the case, an agent designer can avoid this situation by modifying the rules that test or augment the substructure of a previous result. If those rules are modified so that they match the previous results by referencing them relative to the superstate than the the local substate, EBBS will be able create a valid rule without any repair.
To detect when this is happening, use the 'chunk' stats command. It will tell you if any of an agent’s learned rules that required repair. If you instruct the explainer to record the chunk, you can also see whether a specific chunk was repaired by looking at the chunk’s individual stats
Missing Operator Selection Knowledge¶
If an agent uses rules that create operator preferences to choose amongst multiple operators in the substate, it is possible that the reasoning behind those rules needs to be incorporated in any rule learned. This topic is discussed in greater detail in ROSK tracking.
EBBS will incorporate relevant operator selection knowledge if you enable the chunk setting add-osk, which is off by default.
Generalizing Over Operators Selected Probabilistically¶
If the problem-solving in a substate involves operators that were selected probabilistically, chunking will not be able to summarize the agent’s reasoning into a correct rule. For a rule to be correct, it must always produce the same result that the substate would have produced if the learned rule was not in production memory. Since a different operator could have been selected which could have resulted in different problem-solving, the substate could easily produce different results than any chunk learned in that substate.
EBBS detects these cases while it is analyzing operator selection preferences. EBBS adds a flag to inndicate whether an operator was selected in an unreliable way (using random selection, numeric preferences, or reinforcement learning). EBBS checks for this flag during backtracing and if it is encountered, EBBS will not add the rule to production memory.
Collapsed Negative Reasoning¶
Over-general chunks can be created when conditions in the behavior trace test for the absence of a working memory elements in the substate. Since there is no clear way for chunking to generate a set of conditions that describe when a given working memory element would not exist in a substate, chunking can’t represent that aspect of the problem-solving.
Chunking can include negated tests if they test for the absence of working memory elements in the superstate, though. So, the agent engineer can avoid using negated conditions for local substate data by either (1) designing the problem-solving so that the data that is being tested in the negation is already in the superstate or (2) making the data a result by attaching it to the superstate. This increases the number of chunks learned, but a negated condition of knowledge in the superstate can be incorporated correctly into learned rules.
Note that there are agent design patterns where local negations are perfectly safe to ignore, so Soar allows local negations by default. In some agents, they are common enough that turning the filter on prevents any rules from being learned.
If you suspect that a rule may be over-general because of locally negated condition, you can verify whether such a condition was encountered during backtracing by using the chunk stats command and explain stats command. See Debugging Explanation-Based Chunking and explain stats for more information.
If such chunks are problematic, turning off chunking’s correctness filter allow-local-negations will force Soar to reject chunks whose problem-solving involved a local negation.
Problem-Solving That Doesn’t Test The Superstate¶
Over-general chunks can be created if a result of a subgoal is dependent on the creation of an impasse within the substate. For example, processing in a subgoal may consist of exhaustively applying all the operators in the problem space. If so, then a convenient way to recognize that all operators have applied and processing is complete is to wait for a state no-change impasse to occur. When the impasse occurs, a production can test for the resulting substate and create a result for the original subgoal. This form of state test builds over-general chunks because no pre-existing structure is relevant to the result that terminates the subgoal. The result is dependent only on the existence of the substate within a substate.
In these cases, EBBS will learn a chunk with no conditions, which it will reject. But the superstate result is still created by the substate rule that matched. If a new rule is learned that uses that result, it will be over-general since the rule does not summarize the reasoning that led to the result, namely that all operators were exhaustively applied.
The current solution to this problem is a bit of a hack. Soar allows an agent to signal to the architecture that a test for a substate is being made by testing for the^quiescence t augmentation of the subgoal. If this special test is found in the behavior trace, EBBS will not build a chunk. The history of this test is maintained, so that if the result of the substate is then used to produce further results for a superstate, no higher chunks will be built.
Disjunctive Context Conflation¶
An incorrect rule can be learned when multiple rules fire in a substate that test different structures in the superstate but create the same WME in the substate. For example, there may be a rule that can match the superstate in several different ways, each time elaborating the local state with a WME indicating that at least one of these qualifying superstate WMEs existed. In such a situation, the rule would fire multiple times, but the result of the rule firings will be collapsed into creating a single WME in the substate.
If this WME is then tested to create a result on the superstate, the chunk that is subsequently created can produce different behavior than the substate would have. In the original subgoal processing, multiple matches produced one substate WME, but that one substate WME only created a single result in the superstate. The chunk on the other hand will match multiple times for each of the items that previously created the substate WME. And then, each one of those matches will create its own distinct result in the superstate. Since this is different behavior than the original substate, this rule would be considered incorrect.
If it were possible, EBBS should learn a disjunctive conjunctive condition, with each disjunction being the superstate conditions tested by each substate rule that had previously created the substate WME that was repeatedly asserted. This is why this potential source of incorrect rules is called disjunctive context conflation.
If this type of reasoning is needed, agents can move the conflating WME to the superstate. The rule learned would then produce only one result regardless of the number of rules that repeatedly created that WME.
Generalizing knowledge retrieved from semantic or episodic memory¶
Generalizing problem-solving based on knowledge recalled from an external memory system can be problematic for three main reasons.
- Knowledge can change after the learning episode Semantic knowledge can be modified by the agent. Different semantic knowledge can effect different problem-solving, in which case a rule based on the original problem-solving would be incorrect.
- Justification for a memory recall is opaque to agent EBBS does not have access to the reasoning behind why a piece of knowledge was recalled from a memory system. For example, consider the case of a semantic memory that is recalled because it has the highest level of activation at a particular time. In a future situation, the same semantic memory may not be the most active, in which case something else would be recalled and different problem-solving could occur. Because of that possibility, the original rule is not guaranteed to produce the same result and hence has the potential to be incorrect. (Note that this can also occur with episodic memory queries.)
- Knowledge from semantic or episodic memory recalled directly into the substate is considered local To understand why this is a problem, remember that a chunk’s conditions are based on the conditions in the behavior trace that tested knowledge linked to a superstate. (See operational analysis for more information.) If semantic or episodic memory is recalled directly into the substate, then any conditions that test that recalled knowledge is considered local to the substate and will not be included as a condition in the chunk. So, even though the substate reasoning required some piece of semantic knowledge to exist, the chunk will not require it. And, since the learned rule is not incorporating some of the reasoning and constraints that involved the recalled knowledge, the rule may be over-general. To avoid this situation, an agent can retrieve the knowledge in a higher-level state rather than the substate in which the rule is learned.
Learning from Instruction¶
Note that some agent designs, for example an agent that learns by instruction, can take advantage of the fact that knowledge recalled from semantic or episodic memory directly into the substate is considered local. For such agents, a rule that is directly dependent on the instructions being in working memory would be useless. The agent would need to get the instruction every time it wanted to perform the task again, defeating the purpose of learning by instruction.
One technique that can be used to produce a more general rule which is not directly dependent on the instruction being in working memory is to first store the instructions in semantic or episodic memory. When the agent is in a substate that it wants to learn a rule based on the instructions, it recalls the instructions from semantic or episodic memory directly into the substate. Because that knowledge is not linked to the superstate, any rules learned in that substate will not be directly dependent on the existence of the instructions.
Since conditions that test the recalled knowledge are not incorporated into the learned rule, it is very easy to learn over-general chunks. To avoid this, any substate rules which test recalled knowledge must also test superstate structures that correspond to the recalled knowledge. Doing so removes the need for the instructions to exist while avoiding over-generality by ensuring that structures in the superstate corresponding to those instructions are still being tested. Those conditions that test superstate WMEs will be generalized and included in the chunk, but the undesired portion of the reason that they matched will not be, namely the fact that the superstate knowledge corresponded to recalled instructions.
Determining Which OSK Preferences are Relevant¶
The following outline describes the logic that happens at each step. For a more detailed description of the various filters (but not the ROSK). Note that depending on the set of preferences being processed, impasses may occur at some of these stages, in which case, no operator is selected and the ROSK is emptied. Moreover, if the candidate set is reduced to zero or one, the decision process will exit with a finalized ROSK. For simplicity’s sake, this explanation assumes that there are no impasses and the decision process continues.
-
Require Filter If an operator is selected based on a require preference, that preference is added to the ROSK. The logic behind this step is straightforward, the require preference directly resulted in the selection of the operator.
-
Prohibit/Reject Filters If there exists at least one prohibit or reject preference, all prohibit and reject preferences for the eliminated candidates are added to the ROSK. The logic behind this stage is that the conditions that led to the exclusion of the prohibited and rejected candidates is what allowed the final operator to be selected from among that particular set of surviving candidates.
-
Better/Worse Filter For every candidate that is not worse than some other candidate, add all better/worse preferences involving the candidate.
-
Best Filter Add any best preferences for remaining candidates to the ROSK.
-
Worst Filter If any remaining candidate has a worst preference which leads to that candidate being removed from consideration, that worst preference is added to the ROSK. Again, the logic is that the conditions that led to that candidate not being selected allowed the final operator to be chosen.
-
Indifferent/Numeric Filter This is the final stage, so the operator is now selected based on the agent’s exploration policy. How indifferent preferences are added to the ROSK depends on whether any numeric indifferent preferences exist.
- If there exists at least one numeric indifferent preference, then every numeric preference for the winning candidate is added to the ROSK. There can be multiple such preferences. Moreover, all binary indifferent preferences between that winning candidate and candidates without a numeric preference are added.
- If all indifferent preferences are non-numeric, then any unary indifferent preferences for the winning candidate are added to the ROSK. Moreover, all binary indifferent preferences between that winning candidate and other candidates are added.
The logic behind adding binary indifferent preferences between the selected operator and the other final candidates is that those binary indifferent preferences prevented a tie impasse and allowed the final candidate to be chosen by the exploration policy from among those mutually indifferent preferences.
Note that there may be cases where two or more rules create the same type of preference for a particular candidate. In those cases, only the first preference encountered is added to the ROSK. Adding all of them can produce over-specific chunks. It may still be possible to learn similar chunks with those other preferences if the agent subgoals again in a similar context.
Note also that operator selection knowledge is not tracked and incorporated into chunks by default. The setting must be turned on via the chunk command’s add-osk setting..
The ROSK also affects the conditions of justifications, so the
add-desirability-prefs setting does have an effect on the agent even if
learning is turned off.
Generalizing Knowledge From Math¶
EBBS introduces the ability to learn more expressive rules whose actions perform arbitrary right-hand side functions with variablized arguments.
It is important to note that this ability is limited. EBBS can only learn rules with generalized RHS functions in its actions when the rule that created the result contained a RHS function. In many cases, RHS functions will be used in the intermediate rule firings in the behavior trace. Not only will these intermediate RHS function not appear in the chunk, but any chunk learned based on their output will become more specific. This is one of the sources of over-specialization referenced in over-specialization and over-generalization on over-specialization.
RHS function calls in intermediate rule firings are a challenge for EBBS to deal with because the problem-solving may have placed constraints on the intermediate results that cannot be represented in a single Soar rule.
For example, consider the case of one rule that used a RHS function to add two numbers. Now consider another rule that matched the output of the RHS function, but only if it was less than 5. If the second rule matched, it would return the total as a result. How could we encode the reasoning of those two rules into one rule? Since Soar’s production syntax does not allow using RHS function as constraints in conditions, there is no way to insure that the two numbers add up to something less than 5 in a single rule. This is why RHS functions in intermediate rule firings can cause over-specialization.
Because the chunk’s conditions can’t represent constraints on the output of intermediate RHS functions, EBBS must literalize both the identities of the variables that appear as arguments to the intermediate RHS function, as well as the identities in any conditions that test the output of the RHS function. That fixes the value of the RHS function and guarantees that any constraints in conditions that test the output of that RHS function will be met. While this will make the learned rule more specific, it will also ensure that the rule is correct.
Situations in which a Chunk is Not Learned¶
Soar learns a chunk every time a subgoal produces a result, unless one of the following conditions is true:
- Chunking is off This corresponds to the command chunk never.
- Chunking was only enabled for some states, and the subgoal in question is not
one of them When chunking is enabled via the only or except command, the agent
must specify which states learning either occurs in or doesn’t occur in,
respectively. For the except setting, Soar will learn rules in all states in
which a
dont-learnRHS production action was not executed. Similarly, for the only setting, Soar will learn rules in all states where aforce-learnRHS production action was executed, cf. Controlling chunking for more information. This capability is provided for debugging and practical system development, but it is not part of the theory of Soar. - The chunk learned is a duplicate of another production or chunk already in production memory In some rare cases, a duplicate production will not be detected because the order of the conditions or actions is not the same as an existing production.
- The problem-solving in the substate violated one of the enabled correctness guarantee filters During the development of explanation-based behavior summarization, we have developed a list of possible causes of incorrect chunks. EBBS’s correctness guarantee filters detect when those situations occur and prevents a chunk from being learned. For example, the allow-local-negations filter will prevent a rule from being formed if the problem-solving that led to the result was dependent on a condition that tested whether a subgoal WME doesn’t exist. Since there is no practical way to determine why a piece of knowledge doesn’t exist, testing a local negation can result in an over-general and incorrect chunk, cf. prohibiting known sources for correctness issues for more information. Note that correctness filters have not yet been implemented for all the identified potential sources of correctness issues.
- The chunking option bottom-only is on and a chunk was already built in the bottom subgoal that generated the results With bottom-only chunking, chunks are learned only in states in which no subgoal has yet generated a chunk. In this mode, chunks are learned only for the "bottom" of the subgoal hierarchy and not the intermediate levels. With experience, the subgoals at the bottom will be replaced by the chunks, allowing higher level subgoals to be chunked. See chunk reference for details of chunk used with the bottom-only setting.
- The problem-solving that led to the result contained a condition that tested
the architecturally-created
<state> ^quiescence taugmentation This mechanism is motivated by the chunking from exhaustion problem, where the results of a subgoal are dependent on the exhaustion of alternatives (see Problem-Solving that does not test the superstate). If this substate augmentation is encountered when determining the conditions of a chunk, then no chunk will be built for the currently considered action. This is recursive, so that if an un-chunked result is relevant to a second result, no chunk will be built for the second result. This does not prevent the creation of a chunk that would include^quiescence tas a condition. - The problem-solving in the substate did not test any knowledge in the superstate In these cases, the chunk learned does not have any conditions and is not a legal production. Note that this creates an unusual persistence issue for any results that came out of the substate. Since a justification or chunk was not learned, there is no rule in the superstate that can provide either i-support or o-support for the result that came out of the substate. Consequently, those result WMEs will be completely dependent on the rules that fired within the substate. So, when the substate is removed, those results will also be removed.
Usage¶
More details on the chunk command and its settings can be found in the
chunk command reference.
Enabling Procedural Learning¶
By default, chunking is off.
- To turn on chunking:
chunk always - To turn off chunking:
chunk never
In real world agents, there may be certain problem spaces in which you don't want your agent to learn rules. Chunking has a mechanism to allow agents to dynamically specify the states in which rules are learned.
- To turn off chunking in all states except ones manually flagged on:
- Use
chunk onlysetting. - Design an agent rule that executes the RHS action
force-learn, which only matches in states in which you want to learn rules.
- Use
- To turn on chunking in all states except ones manually flagged off:
- Use
chunk exceptsetting. - Design an agent rule that executes the RHS action
dont-learn, which only matches in states in which you don't want to learn rules.
- Use
Depending on your agent design, you may want to consider enabling the
add-osk option. As of Soar 9.6.0, EBBS does not incorporate operator
selection knowledge into learned rules by default, since there is a
performance cost and not all agents designs require its inclusion. You
may want to enable this option if your agent has rules that test
knowledge in the superstate to create operator preferences in the
substate. See the section on learning and operator selection knowledge
for more information.
See the chunk command reference for more information about using the chunk command to enable and disable procedural learning.
Fine-tuning What Your Agent Learns¶
Prohibiting known sources of correctness issues¶
It is theoretically possible to detect nearly all of the sources of
correctness issues and prevent rules from forming when those situations
are detected. In Soar 9.6.0, though, only one filter is available,
allow-local-negations. Future versions of Soar will include more
correctness filters.
Note that it is still possible to detect that your agent may have
encountered a known source of a correctness issue by looking at the
output of the chunk stats command. It has specific statistics for some
of the sources, while others can be gleaned indirectly. For example, if
the stats show that some rules required repair, you know that your agent
testing or augmenting a previous result in a substate.
Using singletons to simplify a rule's conditions¶
Unlike previous versions of chunking, EBBS adds all conditions that tested superstate knowledge to a chunk, regardless of whether another condition already tested that working memory element. This means that EBBS can sometimes produce learned rules with seemingly duplicate conditions. While these conditions are logically correct, they may be redundant because the nature of the domain may make it impossible for the two conditions to match different working memory elements. For example, in the blocks-world domain, the fact that there can be only one gripper in the world means that having multiple conditions testing for a gripper would be redundant.
Soar allows agents to specify such known domain characteristics, which
EBBS will then use to create better rules that don't have such
unnecessary conditions. We call any working memory element that is
guaranteed to only have a single possible value at any given time, a
singleton. If EBBS encounters two different conditions in the backtrace
that both test the same superstate WME that matches a user singleton
pattern, it will merge the two conditions. There are several
architectural singletons that EBBS already knows about. To specify
patterns for domain-specific singletons, the chunk singleton command
can be used.
See the chunk command reference for more information about the chunk singleton command.
Examining What Was Learned¶
Printing and Traces¶
Printing Rules:
- To print all chunks learned:
print --chunksorprint -c - To print all justifications learned (and still matching):
print --justificationsorprint -j - To print a rule or justification:
print <rule-name>
For more information on print, see the print command reference.
Trace Messages:
- To print when new rules are learned (just the name):
trace --learning 1ortrace -l 1 - To print when new rules are learned (the full rule):
trace --learning 2ortrace -l 2 - To print a trace of the conditions as they are collected during
backtracing:
trace --backtracingortrace -b - To print warnings about chunking issues detected while learning:
trace --chunk-warningsortrace -C - To print when learned chunks match and fire:
trace --backtracingortrace -b
For more information on trace, see the trace command reference.
Note that the most detailed information about why a particular rule was learned can be acquired using the explain mechanism as described in the explain command reference. That is highly recommended over printing the backtracing trace messages.
Chunking Statistics¶
Chunking automatically compiles various statistics about the procedural
rule learning that an agent performs. To access these stats, use the
command chunk stats or stats -l
Note that similar statistics for a specific learned rule can be acquired using the explain mechanism as described in the explain command reference.
Interrupting Execution To Examine Learning¶
- To stop Soar after each successful learning episode:
chunk interrupt on - To stop Soar after detecting any learning issue:
chunk warning-interrupt on - To stop Soar after learning a rule that the explainer recorded:
chunk explain-interrupt on
For more information about how to record when a specific rule is learned, see the explain command reference that describes the explain mechanism.
Explaining Learned Procedural Knowledge¶
While explanation-based behavior summarization makes it easier for people to now incorporate learning into their agents, the complexity of the analysis it performs makes it far more difficult to understand how the learned rules were formed. The explainer is a new module that has been developed to help ameliorate this problem. The explainer allows you to interactively explore how rules were learned.
When requested, the explainer will make a very detailed record of everything that happened during a learning episode. Once a user specifies a recorded chunk to "discuss", they can browse all of the rule firings that contributed to the learned rule, one at a time. The explainer will present each of these rules with detailed information about the identity of the variables, whether it tested knowledge relevant to the the superstate, and how it is connected to other rule firings in the substate. Rule firings are assigned IDs so that user can quickly choose a new rule to examine.
The explainer can also present several different screens that show more verbose analyses of how the chunk was created. Specifically, the user can ask for a description of (1) the chunk's initial formation, (2) the identities of variables and how they map to identity sets, (3) the constraints that the problem-solving placed on values that a particular identity can have, and (4) specific statistics about that chunk, such as whether correctness issues were detected or whether it required repair to make it fully operational.
Finally, the explainer will also create the data necessary to visualize all of the processing described in an image using the new 'visualize' command. These visualization are the easiest way to quickly understand how a rule was formed.
Note that, despite recording so much information, a lot of effort has been put into minimizing the cost of the explainer. When debugging, we often let it record all chunks and justifications formed because it is efficient enough to do so.
Use the explain command without any arguments to display a summary of
which rule firings the explainer is watching. It also shows which chunk
or justification the user has specified is the current focus of its
output, i.e. the chunk being discussed.
Tip: This is a good way to get a chunk id so that you don't have to type or paste in a chunk name.
explain chunk [ <chunk id> | <chunk name> ]
This command starts the explanation process by specifying which chunk's explanation trace you want to explore.
Tip: Use the alias c to quickly start discussing a chunk, for example:
explain formation
Once you specify a rule to explain, this will be one of the first commands you issue. explain formation provides an explanation of the initial rule that fired which created a result. This is what is called the `base instantiation' and is what led to the chunk being learned. Other rules may also be base instantiations if they previously created children of the base instantiation's results. They also will be listed in the initial formation output.
explain instantiation <instantiation id>
This command prints a specific instantiation in the behavior trace. This lets you browse the instantiation graph one rule at a time. This is probably one of the most common things you will do while using the explainer.
Tip: Use the alias i <instantiation id> to quickly view an
instantiation, for example:
explain [explanation-trace | wm-trace]
In most cases, users spend most of their time browsing the explanation trace. This is where chunking learns most of the subtle relationships that you are likely to be debugging. But users will also need to examine the working memory trace to see the specific values matched.
To switch between traces, you can use the explain e and the explain w
commands.
Tip: Use the aliases et and wt to quickly switch between traces.
explain constraints
This feature lists all constraints found in non-operational constraints of the explanation trace. If these constraints were not met, the problem-solving would not have occurred.
This feature is not yet implemented. You can use explain stats to see
if any transitive constraints were added to a particular chunk.
explain identity
explain identity will show the mappings from variable identities to
identity sets. If available, the variable in a chunk that an identity set
maps to will also be displayed.
an identity set maps to will also be displayed.
By default, only identity sets that appear in the chunk will be displayed
in the identity analysis. To see the identity set mappings for other
sets, change the only-chunk-identities setting to off.
explain stats
Explain's stat command prints statistics about the specific chunk being
discussed. This is a good way to see whether any generality or
correctness issues were detected while learning that rule.
After-Action Reports¶
The explainer has an option to create text files that contain statistics
about the rules learned by an agent during a particular run. When
enabled, the explainer will write out a file with the statistics when
either Soar exits or a soar init is executed. This option is still
considered experimental and in beta.
Visualizing the Explanation¶
The visualize command can generate two graphical representations of the
analysis that chunking performed to learn a rule. While the explainer
provides more data, these images are the easiest and most effective ways
to quickly understand how a chunk was formed, especially for particularly
complex chunks. The visualizer can create two types of chunking-related
images:
-
An image that shows the entire instantiation graph at once and how it contributed to the learned rule.
Use the command
visualize ebc analysisto create a very informative graph that shows all rules that fired in a substate with arrows that indicate dependencies between actions in one rule and conditions in others. In addition to all of the dependencies between the rules that fired, this visualization also shows which conditions in the instantiations tested knowledge in the superstate and hence became the basis for a condition in the final learned rule. Finally, the individual elements in the explanation are color-coded to show which variables share the same identity. -
An image that shows the graph of how variable identities were combined.
Use the
visualize identity graphto create a graph that shows how identities were used to determine the variablization of a learned rule. This shows all identities found in the chunk and how the identity analysis joined them based on the problem-solving that occurred. This can be useful in determining why two elements were assigned the same variable.
Note that Soar will automatically attempt to launch a viewer to see the image generated. If you have an editor that can open graphviz files, you can have Soar launch that automatically as well. (Such editors allow you to move things around and lay out the components of the image exactly as you want them.) Your operating system chooses which program to launch based on the file type.
For the visualizer to work, you must have Graphviz and DOT installed, which are free third-party tools, and both must be available on your path. To date, the visualizer has only been tested on Mac and Linux. It is possible that certain systems may not allow Soar to launch an external program.